联系我们
- 地 址:大连市甘井子区姚北路25-18号
- 电 话:0411-39525022
-
联系人:13390021336
- Q Q:2605506593
- 网 址:www.hgcx.cn
- 传 真:0411-39525009
- E-mail: info@hgcx.cn


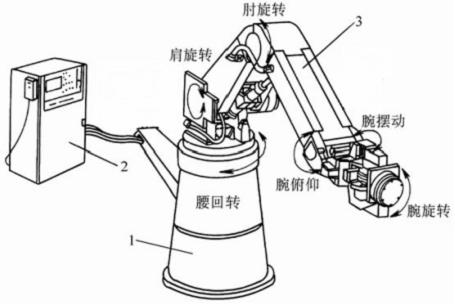
1. 执行机构:
一种具有和人手臂相似的动作功能,可在空间抓放物体或执行其他操作的机械装置,通常包括:机座(图1中1)、手臂(图1中3)、手腕和末端执行器。
1) 末端执行器(或称手部)——手部是机器人直接执行工作的装置,可安装夹持器、工具、传感器等。大连华工创新科技有限公司选用的机器人有两种使用模式:一、机器人手部夹持工件,与涂胶头配合,用于完成轻型或尺寸规格较小的零部件的局部涂胶工作。二、机器人手部夹持涂胶头,用于较重或尺寸规格较大的零部件的局部涂胶工作。工业机器人的使用有效完成了复杂轨迹的捕捉和工件局部凸出物的避让工作。
2) 手腕——手腕是连接手臂和末端执行器的部件,用以调整末端执行器的方位和姿态。
3) 手臂——手臂是支承手腕和末端执行器的部件。它由动力关节和连杆组成,用来改变末端执行器的空间位置。
4) 机座——机座是工业机器人的基础部件,承受相应的载荷,机座分为固定式和移动式两类。
2. 控制系统(图1中2)
控制系统是机器人的大脑,支配着机器人按规定的程序运动,并记忆预先指定的指令信息(如动作顺序、运动轨迹、运动速度等),同时按其控制系统的信息控制执行机构按规定要求动作。
采用计算机控制的工业机器人,控制系统分成决策级、策略级和执行级三级。
1) 决策级的功能是识别环境、建立模型、将作业任务分解为基本动作序列;
2) 策略级的功能是将基本动作变为关节坐标协调变化的规律,分配给各关节的伺服系统;
3) 执行级的功能是给出各关节伺服系统的具体指令。
3. 检测系统
主要检测工业机器人执行系统的运动位置、状态,并随时将执行系统的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,使执行系统以一定放入精度达到设定位置状态。常用力、位置、触觉、视觉等传感器。
4. 驱动系统(液压缸、电机等)
驱动系统是按照控制系统发出的控制指令将信号放大,驱动执行机构运动的传动装置。常用的有电气、液压、气动和机械等四种驱动方式。
有些机器人采用这些驱动方式的组合, 如电—液混合驱动和气—液混合驱动等驱动方式。